
OXC (ການເຊື່ອມຕໍ່ຂ້າມແສງ) ແມ່ນລຸ້ນທີ່ພັດທະນາແລ້ວຂອງ ROADM (ຕົວແປງສັນຍານເພີ່ມແສງທີ່ສາມາດຕັ້ງຄ່າໄດ້ຄືນໃໝ່).
ໃນຖານະທີ່ເປັນອົງປະກອບສະຫຼັບຫຼັກຂອງເຄືອຂ່າຍແສງ, ຄວາມສາມາດໃນການຂະຫຍາຍ ແລະ ປະສິດທິພາບດ້ານຕົ້ນທຶນຂອງການເຊື່ອມຕໍ່ຂ້າມແສງ (OXCs) ບໍ່ພຽງແຕ່ກຳນົດຄວາມຍືດຫຍຸ່ນຂອງໂທໂພໂລຢີເຄືອຂ່າຍເທົ່ານັ້ນ ແຕ່ຍັງສົ່ງຜົນກະທົບໂດຍກົງຕໍ່ຄ່າໃຊ້ຈ່າຍໃນການກໍ່ສ້າງ, ການດຳເນີນງານ ແລະ ການບຳລຸງຮັກສາຂອງເຄືອຂ່າຍແສງຂະໜາດໃຫຍ່. OXCs ປະເພດຕ່າງໆສະແດງໃຫ້ເຫັນຄວາມແຕກຕ່າງທີ່ສຳຄັນໃນການອອກແບບສະຖາປັດຕະຍະກຳ ແລະ ການຈັດຕັ້ງປະຕິບັດໜ້າທີ່.
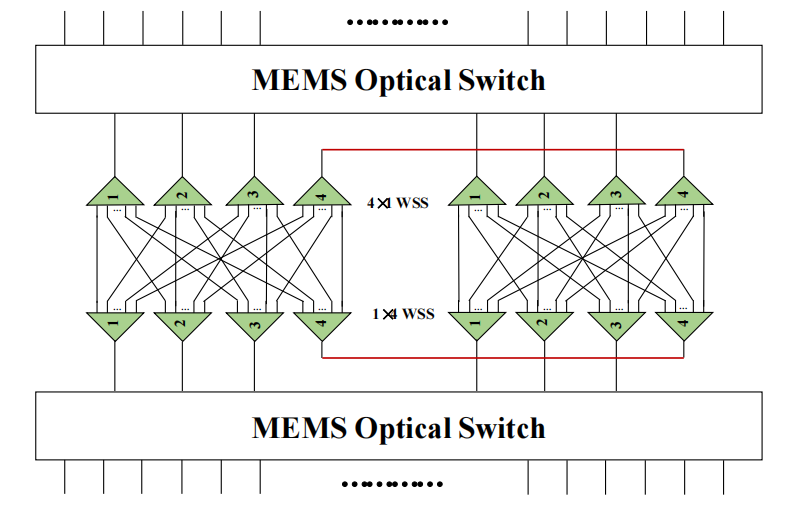
ຮູບຂ້າງລຸ່ມນີ້ສະແດງໃຫ້ເຫັນສະຖາປັດຕະຍະກຳ CDC-OXC (Colorless Directionless Contentionless Optical Cross-Connect) ແບບດັ້ງເດີມ, ເຊິ່ງໃຊ້ສະວິດເລືອກຄວາມຍາວຄື້ນ (WSS). ໃນດ້ານສາຍ, 1 × N ແລະ N × 1 WSS ເຮັດໜ້າທີ່ເປັນໂມດູນເຂົ້າ/ອອກ, ໃນຂະນະທີ່ M × K WSS ໃນດ້ານເພີ່ມ/ຫຼຸດຈະຈັດການການບວກ ແລະ ຫຼຸດຄວາມຍາວຄື້ນ. ໂມດູນເຫຼົ່ານີ້ເຊື່ອມຕໍ່ກັນຜ່ານເສັ້ນໄຍແສງພາຍໃນແຜ່ນຫຼັງ OXC.
ຮູບພາບ: ສະຖາປັດຕະຍະກຳ CDC-OXC ແບບດັ້ງເດີມ
ສິ່ງນີ້ຍັງສາມາດບັນລຸໄດ້ໂດຍການປ່ຽນ backplane ໄປເປັນເຄືອຂ່າຍ Spanke, ເຊິ່ງເຮັດໃຫ້ສະຖາປັດຕະຍະກຳ Spanke-OXC ຂອງພວກເຮົາ.
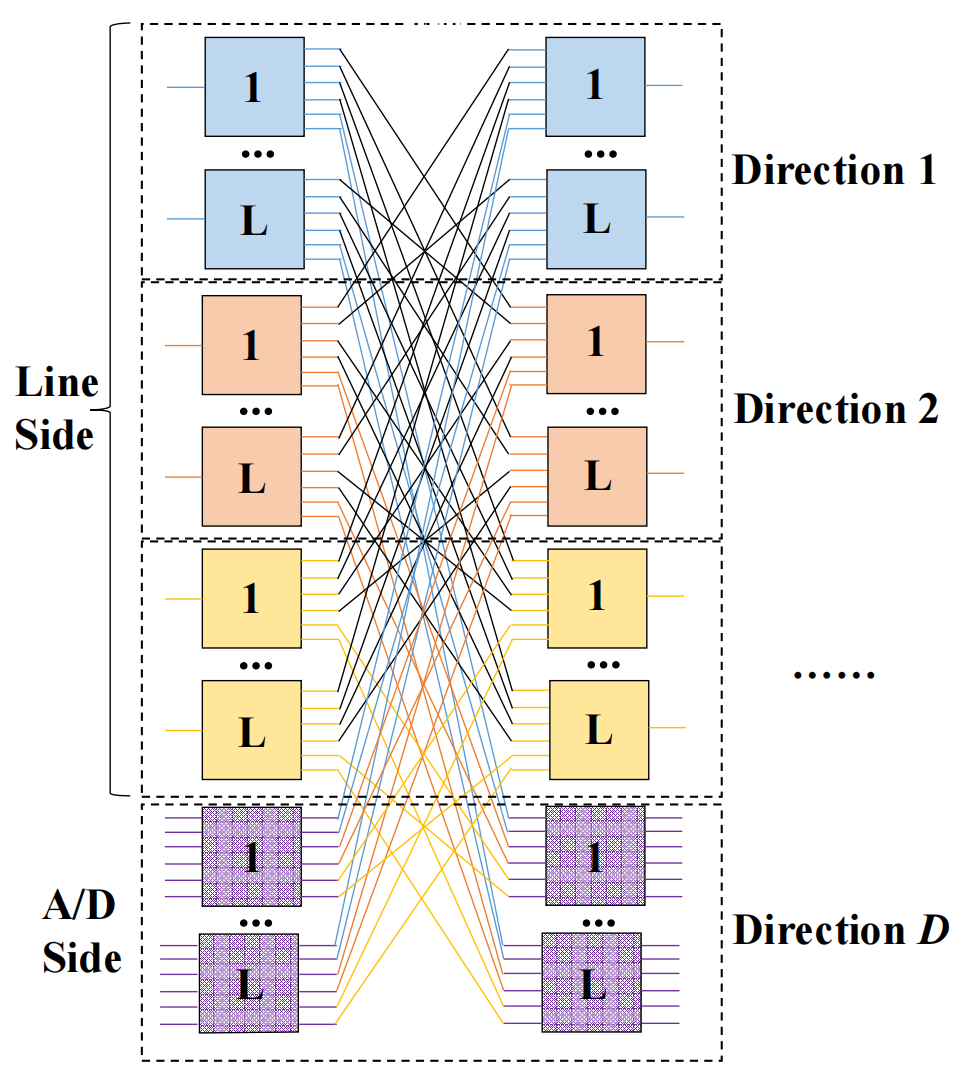
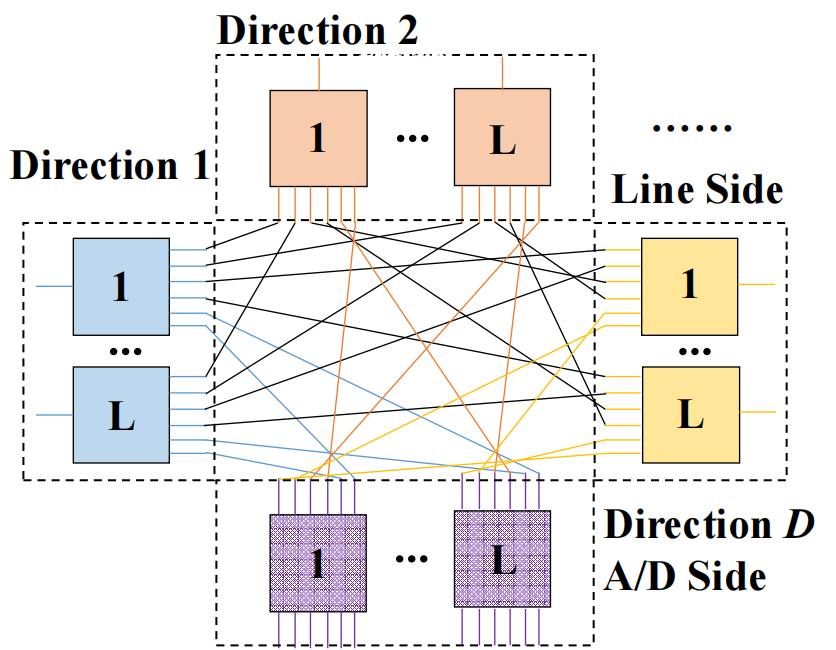
ຮູບ: ສະຖາປັດຕະຍະກຳ Spanke-OXC
ຮູບຂ້າງເທິງສະແດງໃຫ້ເຫັນວ່າຢູ່ດ້ານສາຍ, OXC ແມ່ນກ່ຽວຂ້ອງກັບສອງປະເພດຂອງພອດຄື: ພອດທິດທາງ ແລະ ພອດເສັ້ນໄຍ. ແຕ່ລະພອດທິດທາງສອດຄ່ອງກັບທິດທາງທາງພູມສາດຂອງ OXC ໃນໂທໂພໂລຢີເຄືອຂ່າຍ, ໃນຂະນະທີ່ແຕ່ລະພອດເສັ້ນໄຍເປັນຕົວແທນຂອງຄູ່ຂອງເສັ້ນໄຍສອງທິດທາງພາຍໃນພອດທິດທາງ. ພອດທິດທາງປະກອບດ້ວຍຄູ່ເສັ້ນໄຍສອງທິດທາງຫຼາຍຄູ່ (ເຊັ່ນ: ພອດເສັ້ນໄຍຫຼາຍພອດ).
ໃນຂະນະທີ່ OXC ທີ່ອີງໃສ່ Spanke ບັນລຸການສະຫຼັບທີ່ບໍ່ຖືກບລັອກຢ່າງເຂັ້ມງວດຜ່ານການອອກແບບ backplane ທີ່ເຊື່ອມຕໍ່ກັນຢ່າງສົມບູນ, ຂໍ້ຈຳກັດຂອງມັນຈະກາຍເປັນສິ່ງສຳຄັນເພີ່ມຂຶ້ນເມື່ອການຈະລາຈອນເຄືອຂ່າຍເພີ່ມຂຶ້ນ. ຂີດຈຳກັດຈຳນວນພອດຂອງສະວິດເລືອກຄວາມຍາວຄື້ນທາງການຄ້າ (WSSs) (ຕົວຢ່າງ, ຈຳນວນພອດສູງສຸດທີ່ຮອງຮັບໃນປະຈຸບັນແມ່ນ 1 × 48, ເຊັ່ນ FlexGrid Twin 1 × 48 ຂອງ Finisar) ໝາຍຄວາມວ່າການຂະຫຍາຍຂະໜາດ OXC ຕ້ອງການການປ່ຽນຮາດແວທັງໝົດ, ເຊິ່ງມີລາຄາແພງ ແລະ ປ້ອງກັນການນຳໃຊ້ອຸປະກອນທີ່ມີຢູ່ແລ້ວຄືນໃໝ່.
ເຖິງແມ່ນວ່າຈະມີສະຖາປັດຕະຍະກຳ OXC ທີ່ມີມິຕິສູງໂດຍອີງໃສ່ເຄືອຂ່າຍ Clos, ແຕ່ມັນຍັງອີງໃສ່ M×N WSS ທີ່ມີລາຄາແພງ, ເຮັດໃຫ້ມັນຍາກທີ່ຈະຕອບສະໜອງຄວາມຕ້ອງການການຍົກລະດັບເທື່ອລະກ້າວ.
ເພື່ອແກ້ໄຂສິ່ງທ້າທາຍນີ້, ນັກຄົ້ນຄວ້າໄດ້ສະເໜີສະຖາປັດຕະຍະກຳປະສົມແບບໃໝ່ຄື: HMWC-OXC (Hybrid MEMS ແລະ WSS Clos Network). ໂດຍການລວມເອົາລະບົບກົນຈັກຈຸລະພາກ (MEMS) ແລະ WSS, ສະຖາປັດຕະຍະກຳນີ້ຮັກສາປະສິດທິພາບເກືອບບໍ່ມີການບລັອກ ໃນຂະນະທີ່ສະໜັບສະໜູນຄວາມສາມາດ "ຈ່າຍຕາມການເຕີບໂຕ", ສະໜອງເສັ້ນທາງການຍົກລະດັບທີ່ມີປະສິດທິພາບດ້ານຕົ້ນທຶນສຳລັບຜູ້ປະກອບການເຄືອຂ່າຍແສງ.
ການອອກແບບຫຼັກຂອງ HMWC-OXC ແມ່ນຢູ່ໃນໂຄງສ້າງເຄືອຂ່າຍ Clos ສາມຊັ້ນຂອງມັນ.
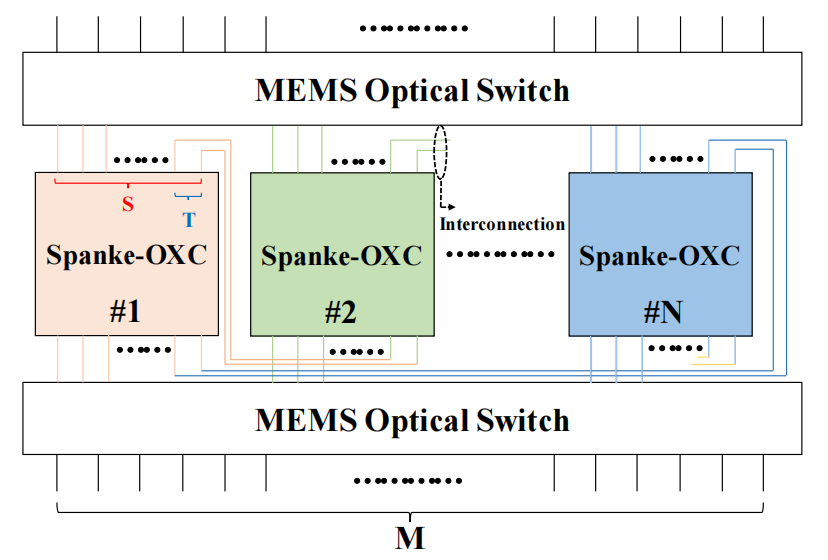
ຮູບພາບ: ສະຖາປັດຕະຍະກຳ Spanke-OXC ໂດຍອີງໃສ່ເຄືອຂ່າຍ HMWC
ສະວິດແສງ MEMS ມິຕິສູງຖືກນຳໃຊ້ຢູ່ຊັ້ນອິນພຸດ ແລະ ຊັ້ນຜົນຜະລິດ, ເຊັ່ນ: ຂະໜາດ 512 × 512 ທີ່ເຕັກໂນໂລຢີໃນປະຈຸບັນຮອງຮັບໃນປະຈຸບັນ, ເພື່ອສ້າງເປັນພອດຄວາມຈຸຂະໜາດໃຫຍ່. ຊັ້ນກາງປະກອບດ້ວຍໂມດູນ Spanke-OXC ຂະໜາດນ້ອຍກວ່າຫຼາຍອັນ, ເຊິ່ງເຊື່ອມຕໍ່ກັນຜ່ານ “ພອດ T” ເພື່ອຫຼຸດຜ່ອນຄວາມແອອັດພາຍໃນ.
ໃນໄລຍະເລີ່ມຕົ້ນ, ຜູ້ປະຕິບັດງານສາມາດສ້າງພື້ນຖານໂຄງລ່າງໂດຍອີງໃສ່ Spanke-OXC ທີ່ມີຢູ່ແລ້ວ (ເຊັ່ນ: ຂະໜາດ 4×4), ພຽງແຕ່ນຳໃຊ້ສະວິດ MEMS (ເຊັ່ນ: 32×32) ຢູ່ທີ່ຊັ້ນອິນພຸດ ແລະ ຊັ້ນຜົນຜະລິດ, ໃນຂະນະທີ່ຮັກສາໂມດູນ Spanke-OXC ດຽວໄວ້ໃນຊັ້ນກາງ (ໃນກໍລະນີນີ້, ຈຳນວນພອດ T ເປັນສູນ). ເມື່ອຄວາມຕ້ອງການຄວາມອາດສາມາດຂອງເຄືອຂ່າຍເພີ່ມຂຶ້ນ, ໂມດູນ Spanke-OXC ໃໝ່ຈະຖືກເພີ່ມເຂົ້າໃນຊັ້ນກາງເທື່ອລະກ້າວ, ແລະພອດ T ຖືກຕັ້ງຄ່າໃຫ້ເຊື່ອມຕໍ່ໂມດູນຕ່າງໆ.
ຕົວຢ່າງ, ເມື່ອຂະຫຍາຍຈຳນວນໂມດູນຊັ້ນກາງຈາກໜຶ່ງເປັນສອງ, ຈຳນວນພອດ T ຈະຖືກຕັ້ງເປັນໜຶ່ງ, ເຊິ່ງເຮັດໃຫ້ຂະໜາດທັງໝົດເພີ່ມຂຶ້ນຈາກສີ່ເປັນຫົກ.
ຮູບພາບ: ຕົວຢ່າງ HMWC-OXC
ຂະບວນການນີ້ປະຕິບັດຕາມຂໍ້ຈຳກັດຂອງພາລາມິເຕີ M > N × (S − T), ບ່ອນທີ່:
M ແມ່ນຈຳນວນພອດ MEMS,
N ແມ່ນຈຳນວນໂມດູນຊັ້ນກາງ,
S ແມ່ນຈຳນວນພອດໃນ Spanke-OXC ດຽວ, ແລະ
T ແມ່ນຈຳນວນພອດທີ່ເຊື່ອມຕໍ່ກັນ.
ໂດຍການປັບຕົວກໍານົດການເຫຼົ່ານີ້ແບບໄດນາມິກ, HMWC-OXC ສາມາດຮອງຮັບການຂະຫຍາຍຕົວເທື່ອລະກ້າວຈາກຂະໜາດເບື້ອງຕົ້ນໄປຫາມິຕິເປົ້າໝາຍ (ເຊັ່ນ 64 × 64) ໂດຍບໍ່ຕ້ອງທົດແທນຊັບພະຍາກອນຮາດແວທັງໝົດໃນເທື່ອດຽວ.
ເພື່ອກວດສອບປະສິດທິພາບຕົວຈິງຂອງສະຖາປັດຕະຍະກຳນີ້, ທີມງານຄົ້ນຄວ້າໄດ້ດຳເນີນການທົດລອງການຈຳລອງໂດຍອີງໃສ່ການຮ້ອງຂໍເສັ້ນທາງແສງແບບເຄື່ອນໄຫວ.
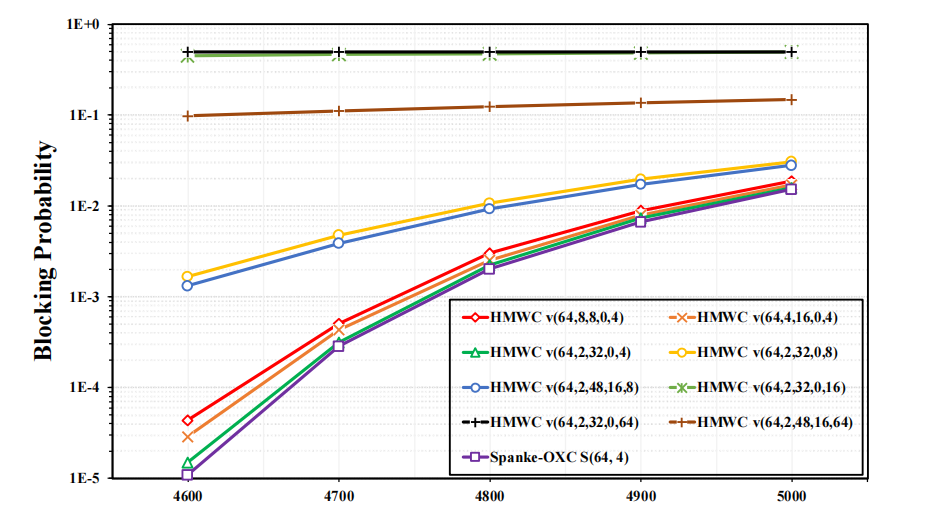
ຮູບ: ການສະກັດກັ້ນປະສິດທິພາບຂອງເຄືອຂ່າຍ HMWC
ການຈຳລອງໃຊ້ຮູບແບບການຈະລາຈອນ Erlang, ໂດຍສົມມຸດວ່າການຮ້ອງຂໍການບໍລິການປະຕິບັດຕາມການແຈກຢາຍ Poisson ແລະເວລາພັກການບໍລິການປະຕິບັດຕາມການແຈກຢາຍ exponential ລົບ. ປະລິມານການຈະລາຈອນທັງໝົດຖືກຕັ້ງໄວ້ທີ່ 3100 Erlangs. ມິຕິ OXC ເປົ້າໝາຍແມ່ນ 64×64, ແລະຂະໜາດ MEMS ຂອງຊັ້ນອິນພຸດ ແລະ ຊັ້ນຜົນຜະລິດກໍ່ແມ່ນ 64×64. ການຕັ້ງຄ່າໂມດູນ Spanke-OXC ຊັ້ນກາງປະກອບມີລາຍລະອຽດ 32×32 ຫຼື 48×48. ຈຳນວນພອດ T ມີຕັ້ງແຕ່ 0 ຫາ 16 ຂຶ້ນກັບຄວາມຕ້ອງການຂອງສະຖານະການ.
ຜົນໄດ້ຮັບສະແດງໃຫ້ເຫັນວ່າ, ໃນສະຖານະການທີ່ມີມິຕິທິດທາງ D = 4, ຄວາມເປັນໄປໄດ້ຂອງການບລັອກຂອງ HMWC-OXC ແມ່ນໃກ້ຄຽງກັບມາດຕະຖານ Spanke-OXC ແບບດັ້ງເດີມ (S(64,4)). ຕົວຢ່າງ, ການໃຊ້ການຕັ້ງຄ່າ v(64,2,32,0,4), ຄວາມເປັນໄປໄດ້ຂອງການບລັອກເພີ່ມຂຶ້ນພຽງແຕ່ປະມານ 5% ພາຍໃຕ້ການໂຫຼດປານກາງ. ເມື່ອມິຕິທິດທາງເພີ່ມຂຶ້ນເປັນ D = 8, ຄວາມເປັນໄປໄດ້ຂອງການບລັອກເພີ່ມຂຶ້ນຍ້ອນ "ຜົນກະທົບຂອງລຳຕົ້ນ" ແລະການຫຼຸດລົງຂອງຄວາມຍາວຂອງເສັ້ນໄຍໃນແຕ່ລະທິດທາງ. ຢ່າງໃດກໍຕາມ, ບັນຫານີ້ສາມາດແກ້ໄຂໄດ້ຢ່າງມີປະສິດທິພາບໂດຍການເພີ່ມຈຳນວນຂອງພອດ T (ຕົວຢ່າງ, ການຕັ້ງຄ່າ v(64,2,48,16,8)).
ສິ່ງທີ່ໜ້າສັງເກດແມ່ນ, ເຖິງແມ່ນວ່າການເພີ່ມໂມດູນຊັ້ນກາງສາມາດເຮັດໃຫ້ເກີດການບລັອກພາຍໃນເນື່ອງຈາກການຂັດແຍ້ງຂອງພອດ T, ແຕ່ສະຖາປັດຕະຍະກຳໂດຍລວມຍັງສາມາດບັນລຸປະສິດທິພາບທີ່ດີທີ່ສຸດຜ່ານການຕັ້ງຄ່າທີ່ເໝາະສົມ.
ການວິເຄາະຕົ້ນທຶນຍັງເນັ້ນໃຫ້ເຫັນເຖິງຂໍ້ດີຂອງ HMWC-OXC ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້.
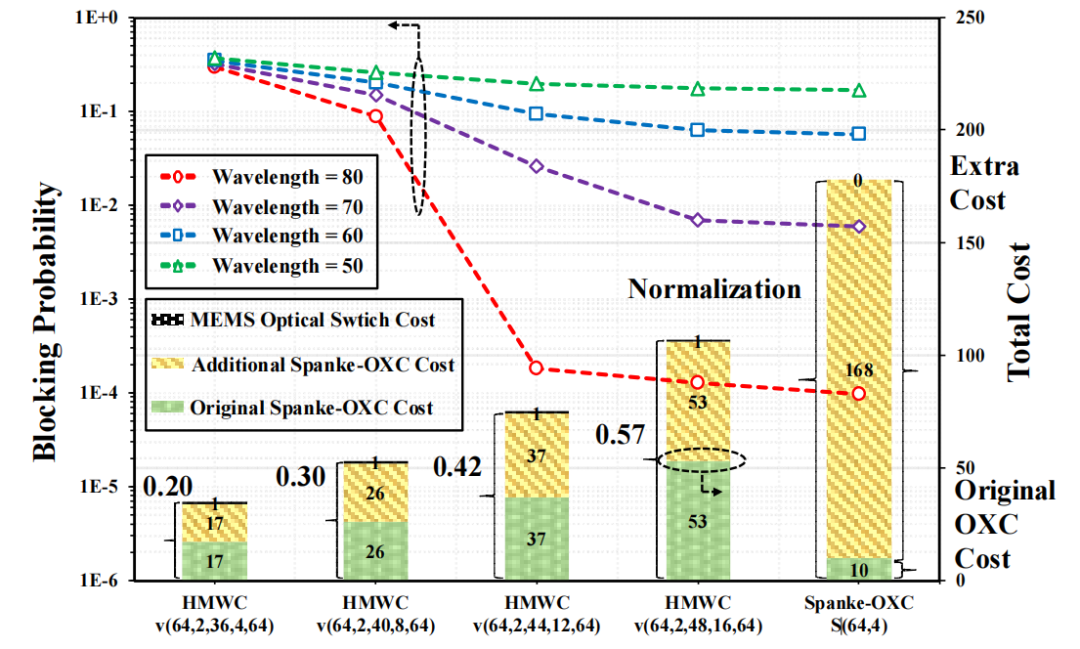
ຮູບ: ຄວາມເປັນໄປໄດ້ຂອງການບລັອກ ແລະ ຄ່າໃຊ້ຈ່າຍຂອງສະຖາປັດຕະຍະກຳ OXC ທີ່ແຕກຕ່າງກັນ
ໃນສະຖານະການທີ່ມີຄວາມໜາແໜ້ນສູງທີ່ມີຄວາມຍາວຄື້ນ 80 ເສັ້ນໄຍ, HMWC-OXC (v(64,2,44,12,64)) ສາມາດຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍໄດ້ 40% ເມື່ອທຽບກັບ Spanke-OXC ແບບດັ້ງເດີມ. ໃນສະຖານະການທີ່ມີຄວາມຍາວຄື້ນຕ່ຳ (ເຊັ່ນ: 50 ຄວາມຍາວຄື້ນ/ເສັ້ນໄຍ), ຂໍ້ໄດ້ປຽບດ້ານຄ່າໃຊ້ຈ່າຍແມ່ນມີຄວາມສຳຄັນຍິ່ງຂຶ້ນຍ້ອນຈຳນວນພອດ T ທີ່ຕ້ອງການຫຼຸດລົງ (ເຊັ່ນ: v(64,2,36,4,64)).
ຜົນປະໂຫຍດທາງເສດຖະກິດນີ້ແມ່ນມາຈາກການປະສົມປະສານຂອງຄວາມໜາແໜ້ນຂອງພອດສູງຂອງສະວິດ MEMS ແລະຍຸດທະສາດການຂະຫຍາຍແບບໂມດູນ, ເຊິ່ງບໍ່ພຽງແຕ່ຫຼີກລ່ຽງຄ່າໃຊ້ຈ່າຍໃນການທົດແທນ WSS ຂະໜາດໃຫຍ່ເທົ່ານັ້ນ ແຕ່ຍັງຊ່ວຍຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍທີ່ເພີ່ມຂຶ້ນໂດຍການນຳໃຊ້ໂມດູນ Spanke-OXC ທີ່ມີຢູ່ແລ້ວຄືນໃໝ່. ຜົນການຈຳລອງຍັງສະແດງໃຫ້ເຫັນວ່າໂດຍການປັບຈຳນວນໂມດູນຊັ້ນກາງ ແລະອັດຕາສ່ວນຂອງພອດ T, HMWC-OXC ສາມາດດຸ່ນດ່ຽງປະສິດທິພາບ ແລະຄ່າໃຊ້ຈ່າຍໄດ້ຢ່າງຍືດຫຍຸ່ນພາຍໃຕ້ຄວາມອາດສາມາດຂອງຄວາມຍາວຄື້ນ ແລະການຕັ້ງຄ່າທິດທາງທີ່ແຕກຕ່າງກັນ, ເຮັດໃຫ້ຜູ້ປະກອບການມີໂອກາດເພີ່ມປະສິດທິພາບຫຼາຍມິຕິ.
ການຄົ້ນຄວ້າໃນອະນາຄົດສາມາດຄົ້ນຫາຂັ້ນຕອນວິທີການຈັດສັນພອດ T ແບບເຄື່ອນໄຫວເພື່ອເພີ່ມປະສິດທິພາບການນຳໃຊ້ຊັບພະຍາກອນພາຍໃນ. ນອກຈາກນັ້ນ, ດ້ວຍຄວາມກ້າວໜ້າໃນຂະບວນການຜະລິດ MEMS, ການເຊື່ອມໂຍງຂອງສະວິດທີ່ມີມິຕິສູງກວ່າຈະຊ່ວຍເສີມຂະຫຍາຍຄວາມສາມາດໃນການຂະຫຍາຍຂອງສະຖາປັດຕະຍະກຳນີ້ຕື່ມອີກ. ສຳລັບຜູ້ປະກອບການເຄືອຂ່າຍ optical, ສະຖາປັດຕະຍະກຳນີ້ແມ່ນເໝາະສົມໂດຍສະເພາະສຳລັບສະຖານະການທີ່ມີການເຕີບໂຕຂອງການຈະລາຈອນທີ່ບໍ່ແນ່ນອນ, ສະໜອງວິທີແກ້ໄຂທາງວິຊາການທີ່ໃຊ້ໄດ້ຈິງສຳລັບການສ້າງເຄືອຂ່າຍກະດູກສັນຫຼັງ optical ທັງໝົດທີ່ມີຄວາມທົນທານ ແລະ ສາມາດຂະຫຍາຍໄດ້.
ເວລາໂພສ: ສິງຫາ-21-2025